info@sensotek.ru
info@sensotek.ru
 +7(495)181-56-67
+7(495)181-56-67
 HOKUYO YVT-35LX-F0")



|
Эффективность позиционирования во многом зависит от корректного позиционирования световой завесы относительно опасной точки.
Световая завеса должна быть расположена на расстоянии, большем/равном минимальному безопасному расстоянию (S), таким образом, что доступ к опасной точке становится возможным только при остановке машинного оборудования.
Световая завеса должна позиционироваться так, чтобы:
Европейский Стандарт EN 999 содержит схемы для определения безопасного расстояния.
Если машинное оборудование на предприятии управляется через Стандарт С, необходимо уделить должное внимание сведениям, изложенным ниже.
Если расстояние S, определённое подобным образом, слишком большое, необходимо: |
 Односторонняя защита |
 Трёхсторонняя защита с применением зеркал отклонения |
ОБЩАЯ ФОРМУЛА ОПРЕДЕЛЕНИЯ МИНИМАЛЬНОГО БЕЗОПАСНОГО РАССТОЯНИЯ
| S = K x T + C |
| S | минимальное безопасное расстояние между защищённой и опасной точкой (мм) |
| K |
скорость приближения тела или частей тела (мм/сек) |
| T | общее время останова оборудования, состоящее из: t1 - время отклика защитного устройства (в секундах) t2 - время отклика оборудования (в секундах) до остановки опасного функционирования |
| C | Дополнительное расстояние (мм). |
Стандарт С также учитывает:
1. Возможное вхождение частей тела в зону чувствительности до их обнаружения.
В этом случае:
- C = 8 x (d-14) если d (разрешение световой завесы) <= 40 мм
- C = 850 если d (разрешение световой завесы) > 40 мм and for 2-, 3-, 4-лучевых световых завес
- C = 1200 - (0,4 x H) для горизонтальных световых завес (значение H: ниже см. таблицу "параллельное направление приближения")
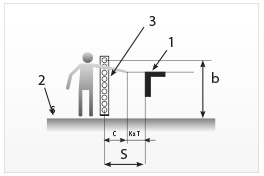 |
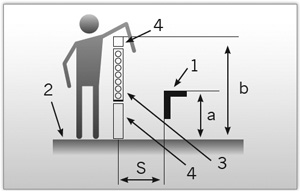
| 1 = Опасная зона 2 = Опорная плоскость 3 = Световая завеса |
2. Случайное достижение точки опасности, перегнувшись через верхнюю границу зоны чувствительности вертикальной световой завесы.
В этом случае С, именуемое “CR0”, может быть получено из Таблицы ISO 13855 / EN 999
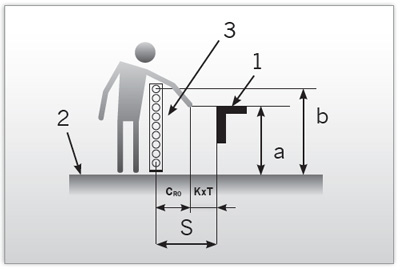 |
| 1 = Опасная зона 2 = Опорная плоскость 3 = Световая завеса |
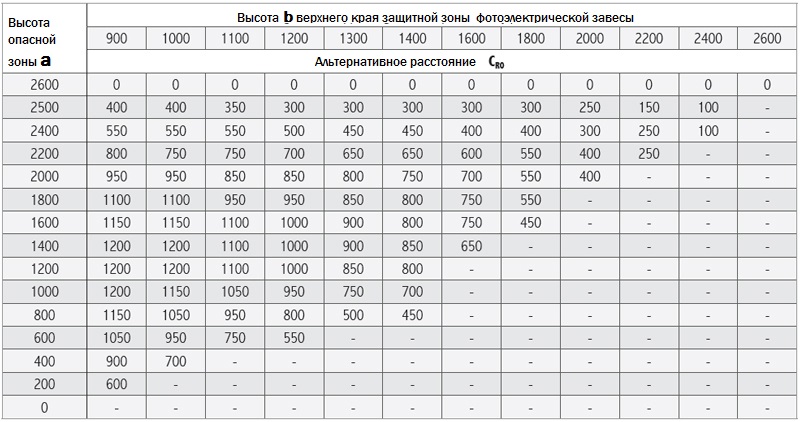
Примечания:
- Интерполяция не допускается.
- Если расстояния а, b или C находятся между значениями, приведёнными в таблице, используйте наибольшее.
- CRO(передача), рассчитанное с использованием Таблицы ISO 13855 / EN 999, должно сравниваться с С (как вычисляется обычно; см. п 1). Всегда выбирайте наибольшее значение.
Для комбинированной механической и электрографической защиты (как показано), где возможно опереться на механическую защиту и обойти световую завесу, для вычисления параметра С следует использовать Таблицу №1 (для приложений с незначительным риском) или Таблицу №2 (для приложений с высоким риском) ISO 13857:2007 (ранее - EN 294) вместо предыдущих таблиц.
В этом руководстве две таблицы ISO 13857:2007 (ранее - EN 294) – безопасное расстояние для предотвращения доступа к опасным зонам верхних и нижних конечностей – не упоминаются.
1 = Опасная зона 2 = Опорная плоскость 3 = Световая завеса 4 = Механическая защита |
 |
При вычислении безопасного расстояния также учитывайте допуски на установку, точность определённого времени отклика и возможное снижение производительности тормозной системы станка.
Где возможно разрушение тормозной системы, используйте контрольно-управляющее устройство характеристик торможения/дистанции торможения.
| НАПРАВЛЕНИЕ ПРИБЛИЖЕНИЯ ПЕРПЕНДИКУЛЯРНО ЗАЩИЩЁННОЙ ПЛОСКОСТИ ПРИ α=90° (± 5°) | ||||||
| Световые завесы с разрешением для обнаружения рук и пальцев Световые завесы (d) ≤ 40 |
Определение минимального безопасного расстояния (S) | |||||
 |
Используйте общую формулу для определения минимального безопасного расстояния S = K x T + C
S=2000xT + 8x(d-14)
Если после применения формулы результат равен: S>500 используйте значение K=1600
S=1600xT + 8x(d-14) |
Расстояние S не должно быть ниже 100 мм.
Если расстояние S превышает 500 мм
В этих условиях расстояние не может быть ниже 500 мм |
||||
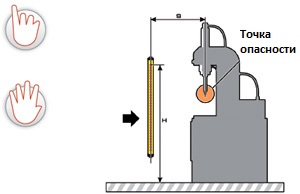
| Световые завесы с разрешением для обнаружения рук и ног. 40 мм <Разрешение световых завес (d) ≤ 70 |
||||||
 |
Используйте общую формулу для определения минимального безопасного расстояния S = K x T + C
S=1600xT + 850 |
Высота низшего луча должна
Высота высшего луча должна |
||||
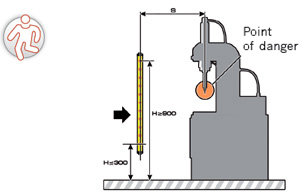
| Световые решётки для обнаружения тела через управление доступом Разрешение световых завес (d)>70 |
||||||
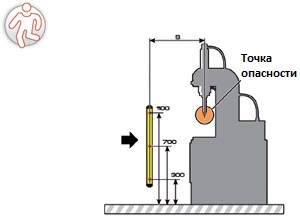 |
Используйте общую формулу для определения минимального безопасного расстояния S = K x T + C
S=1600xT + 850
|
Число и высота лучей
|
||||
| НАПРАВЛЕНИЕ ПРИБЛИЖЕНИЯ ПАРАЛЛЕЛЬНО ЗАЩИЩЁННОЙ ПЛОСКОСТИ ПРИ α=0° (± 5°) | ||||||
| Горизонтальные световые завесы для контроля нахождения в опасной зоне. |
||||||
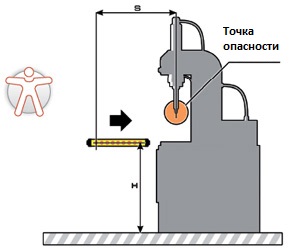 |
Используйте общую формулу для определения минимального безопасного расстояния S = K x T + C
S=1600xT +(1200-0,4xH)
|
C = 1200 - (0,4 x H) Должно быть равным/больше
Максимальная разрешённая высота:
Высота Н зависит от разрешения d
Данная формула также может быть использована для определения
Например, максимальные пределы разрешения будут следующими:
Если Н больше 300 мм, на стадии оценки |
||||
| НАПРАВЛЕНИЕ ПРИБЛИЖЕНИЯ ПОД УГЛОМ К ЗАЩИЩЁННОЙ ПЛОСКОСТИ ПРИ 5°<α<85° |
||||||
| Наклонные световые завесы для обнаружения кистей и рук; для контроля нахождения в опасной зоне |
||||||
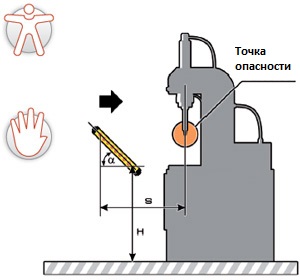 |
При угле α >30° используйте схему перпендикулярного приближения
При угле α <30° используйте схему параллельного приближения к защищённой плоскости. |
При угле α >30°: расстояние S относится к самому
Высота самого дальнего луча от опасной точки
Для определения высоты H или разрешения D используйте формулы для низшего луча: : |
||||